
Tugeva tööjõuga poolautomaatne logistikapinkide süsteem on puukoolide ja potitaimede jaoks kuluefektiivne. See võimaldab pinke paindlikult mööda rööpaid liigutada, optimeerides ruumi ja vähendades investeerimiskulusid võrreldes täisautomaatsete süsteemidega.


1. Komponendid
See süsteem koosneb pingimehhanismist, vertikaalsest tugimehhanismist, laua sisse- ja väljalaskemehhanismist, elektrilisest juhtimisest (jalajäljeklapp ja elektritarvikud), alamjuhtimiskapist, tsingitud poltidest, mutritest, tihenditest ja muudest liitmike osadest.
1.1 Tabelid
Olenevalt kasutusotstarbest ja koormusnõuetest pakub laud mitmekülgseid valikuid, sealhulgas võrk- või mõõn- ja voolustiilis disaini. Selle tugeval konstruktsioonil on alumiiniumsulamist välisraam, mis on ühendatud tugevdatud terasrestiga. Sisekomponentide jaoks saavad kasutajad valida paisutatud metalli, sirgete risttalade või metallvõrgu vahel, tagades kohandatavuse erinevate rakendustega.
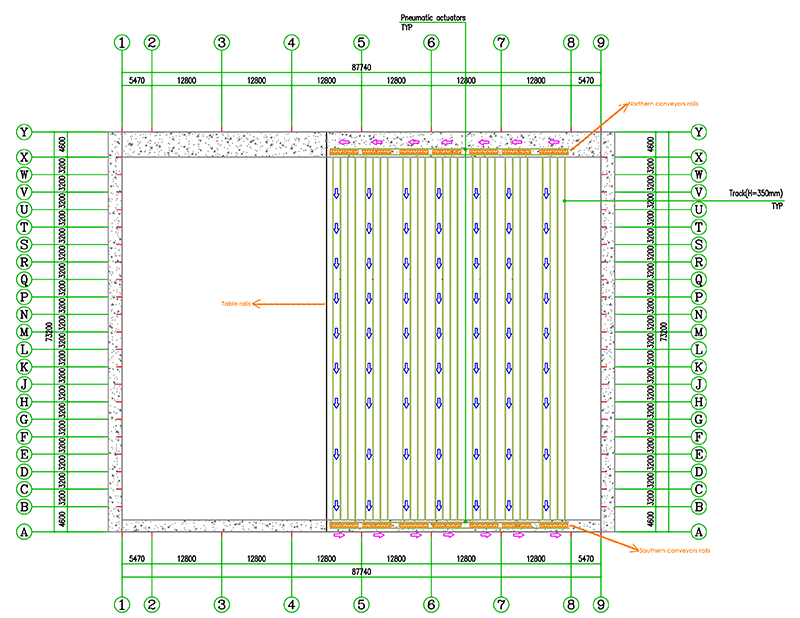
1.2 Tugisiinid ja vundament
*Vertikaalsed lauasiinid (põhjast lõunasse): maapealne rööbastee koosneb 4 tugevdatud tugirööpast, mis taluvad koormusi 169,5kg/m² kuni 212kg/m², rööpa kõrgusega 0,35m.
*Horisontaalsed konveierirööpad (põhjas ja lõunas).
*Rööpajalgade vundament: betoonalus või ribavundament piki siini jalgu.
3. Toimimispõhimõte
Pink tõstetakse pneumaatiliste või elektriliste tõstukite abil esmalt põhjapoolselt konveierisiinilt lauasiinidele. Kui see on lauasiinidel, lükatakse see käsitsi soovitud asendisse. Lõpuks viivad pneumaatilised või elektrilised tõstukid pingi lauasiinidelt lõunapoolsele konveierirööpale.
4. Laua üleminek konveieri/lauasiinide süsteemilt lauarööpa/konveieri süsteemile?
1. Nurgas pööratav lahendus
2. Pneumaatilised/elektrilised tõstukid ja lineaarne ajam





















